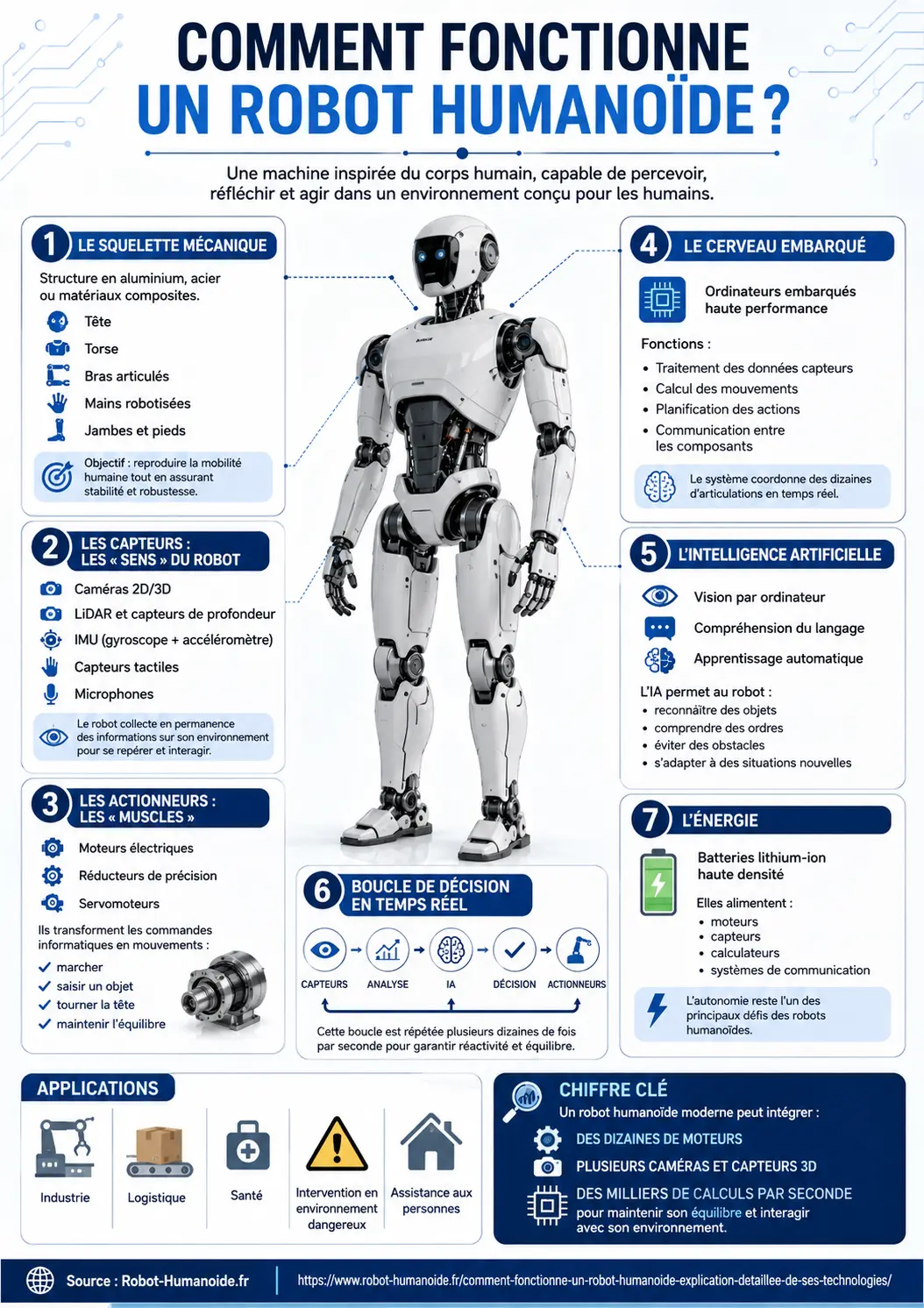
Un robot humanoïde imite la forme et les mouvements du corps humain pour se déplacer et interagir dans des environnements conçus pour les personnes. Il combine mécanique de précision, capteurs avancés et intelligence artificielle pour percevoir, décider et agir en continu.
Grâce à cette architecture, ces robots marchent, saisissent des objets, évitent des obstacles et accomplissent des tâches complexes. Leur fonctionnement repose sur une boucle permanente : perception → traitement → action.
La structure mécanique du robot humanoïde
Le squelette du robot est fabriqué avec des matériaux légers et solides comme l’aluminium, le titane ou la fibre de carbone. Cette ossature supporte tous les composants tout en restant suffisamment flexible pour reproduire les gestes humains.
Articulations et degrés de liberté
La plupart des robots humanoïdes disposent de 20 à 56 degrés de liberté. Chaque articulation est conçue pour reproduire les rotations et flexions du corps humain. Les concepteurs optimisent la répartition des masses pour maintenir un centre de gravité stable pendant la marche et les manipulations.
Les capteurs : le système de perception du robot
Les capteurs fournissent au robot une vision complète de son environnement et de son propre état. Ils se divisent en deux catégories principales.
Capteurs proprioceptifs : ils mesurent l’état interne (position des articulations, force, accélération, orientation).
Capteurs extéroceptifs : ils captent le monde extérieur (vision, son, toucher, profondeur).
- Caméras RGB et caméras de profondeur pour la reconnaissance d’objets et d’obstacles
- Unités de mesure inertielle (IMU) et gyroscopes pour l’équilibre
- Capteurs de force et de couple aux pieds et aux mains
- Microphones pour la reconnaissance vocale et la localisation sonore
- Capteurs tactiles dans les mains pour évaluer la pression et la texture
Toutes ces données sont fusionnées en temps réel pour créer une carte précise de l’environnement et de la posture du robot.
Les actionneurs : les moteurs du mouvement
Les actionneurs transforment l’énergie en mouvement mécanique, comme les muscles chez l’humain. Les moteurs électriques brushless dominent les modèles actuels car ils offrent précision, puissance et fiabilité.
Chaque actionneur est généralement associé à un réducteur harmonique ou planétaire pour multiplier le couple tout en conservant une grande précision. Des capteurs intégrés renvoient immédiatement la position et la force réelle au système de contrôle.
Le cerveau du robot : contrôle et intelligence artificielle
Un ordinateur embarqué puissant traite des milliers de données par seconde. L’intelligence artificielle joue un rôle central à plusieurs niveaux :
- Reconnaissance visuelle grâce à des réseaux de neurones profonds
- Planification de mouvements avec des algorithmes de type Model Predictive Control (MPC)
- Contrôle global du corps entier (Whole-Body Control)
- Apprentissage par renforcement pour améliorer les performances au fil du temps
La marche bipède et l’équilibre
La technique du Zero Moment Point (ZMP) reste fondamentale. Elle permet au robot de maintenir son équilibre en calculant en continu le point où les forces de réaction au sol s’appliquent. Les algorithmes les plus récents anticipent plusieurs pas à l’avance et corrigent les perturbations en temps réel.
Exemples de robots humanoïdes actuels
Le nouvel Atlas de Boston Dynamics (version électrique) démontre des capacités impressionnantes en locomotion dynamique et en manipulation industrielle. Tesla Optimus mise sur une production de masse et une architecture IA proche des voitures autonomes. D’autres constructeurs comme Unitree ou Agility Robotics développent des modèles plus accessibles ou spécialisés.
Tableau des principaux composants
| Composant | Rôle principal | Technologies principales |
|---|---|---|
| Structure mécanique | Support et mobilité | Aluminium, titane, fibre de carbone, articulations multi-axes |
| Capteurs | Perception | Caméras, IMU, capteurs de force, LiDAR, microphones |
| Actionneurs | Mouvement | Moteurs électriques brushless, réducteurs harmoniques |
| Système de contrôle | Intelligence et décision | IA, MPC, Whole-Body Control, apprentissage par renforcement |
Le fonctionnement d’un robot humanoïde repose donc sur l’intégration parfaite entre mécanique, perception et calcul intelligent. Chaque nouvelle génération bénéficie des progrès en électronique, en matériaux et en intelligence artificielle, rendant ces machines de plus en plus autonomes et performantes dans des environnements réels.
Avec l’évolution rapide des technologies, les robots humanoïdes passent progressivement du laboratoire aux applications industrielles et quotidiennes.